ColibriSTUDIO
ColibriSTUDIO is the ultimate 4° generation industrial off line programming software, for robots and CNC machines, fully integrated in an advanced CAD/CAM platform, where it is possible to easily generate toolpaths and immediately simulate them to obtain error free machining program.
ColibriSTUDIO features and benefits
- CAD/CAM/SIMULATION seamless integration
- measuring programs creation
- foundry specific programs creation
- suitable for scara&cartesian cnc machines and robots
- integrated machine&work-cycle simulation
- -80% programming time
- 1 week learning time, even for dummies
RUN YOUR MACHINE QUICKLY&EASLY WITH ERRORS FREE HIGH SPEED PROGRAMS
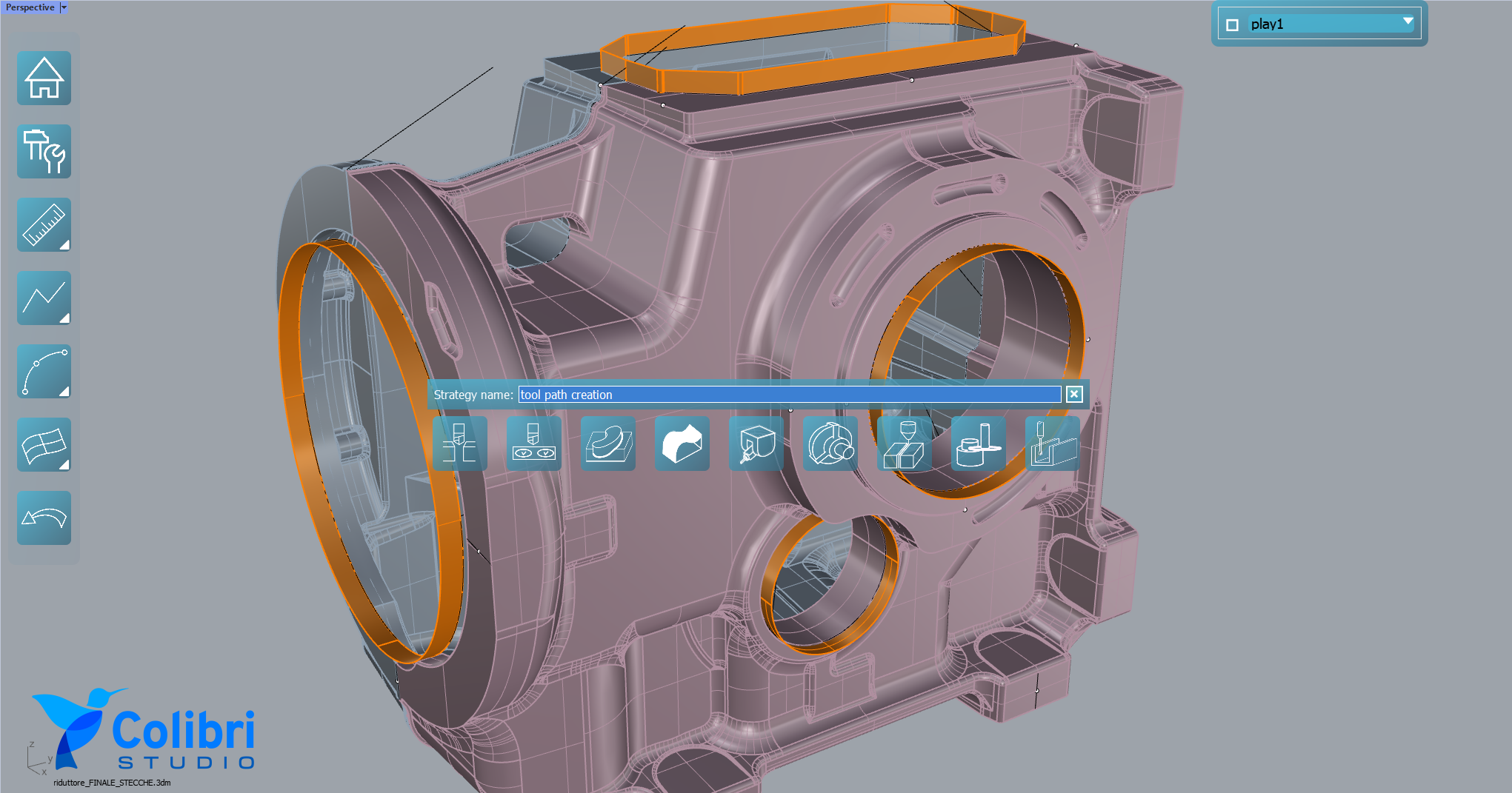
TOOL PATH CREATION
Built on a full functions CAD environment, no matter how complex the 3D model is, the user can quickly and easily create tool paths from measuring and for casting grinding.
ColibriSTUDIO allows to:
- manage 3D geometry directly – no need of another CAD program
- advanced, machine connected, tools library
- select geometry >> create measuring program
- select geometry >> create cutting program
- select geometry >> create grinding and deburring program
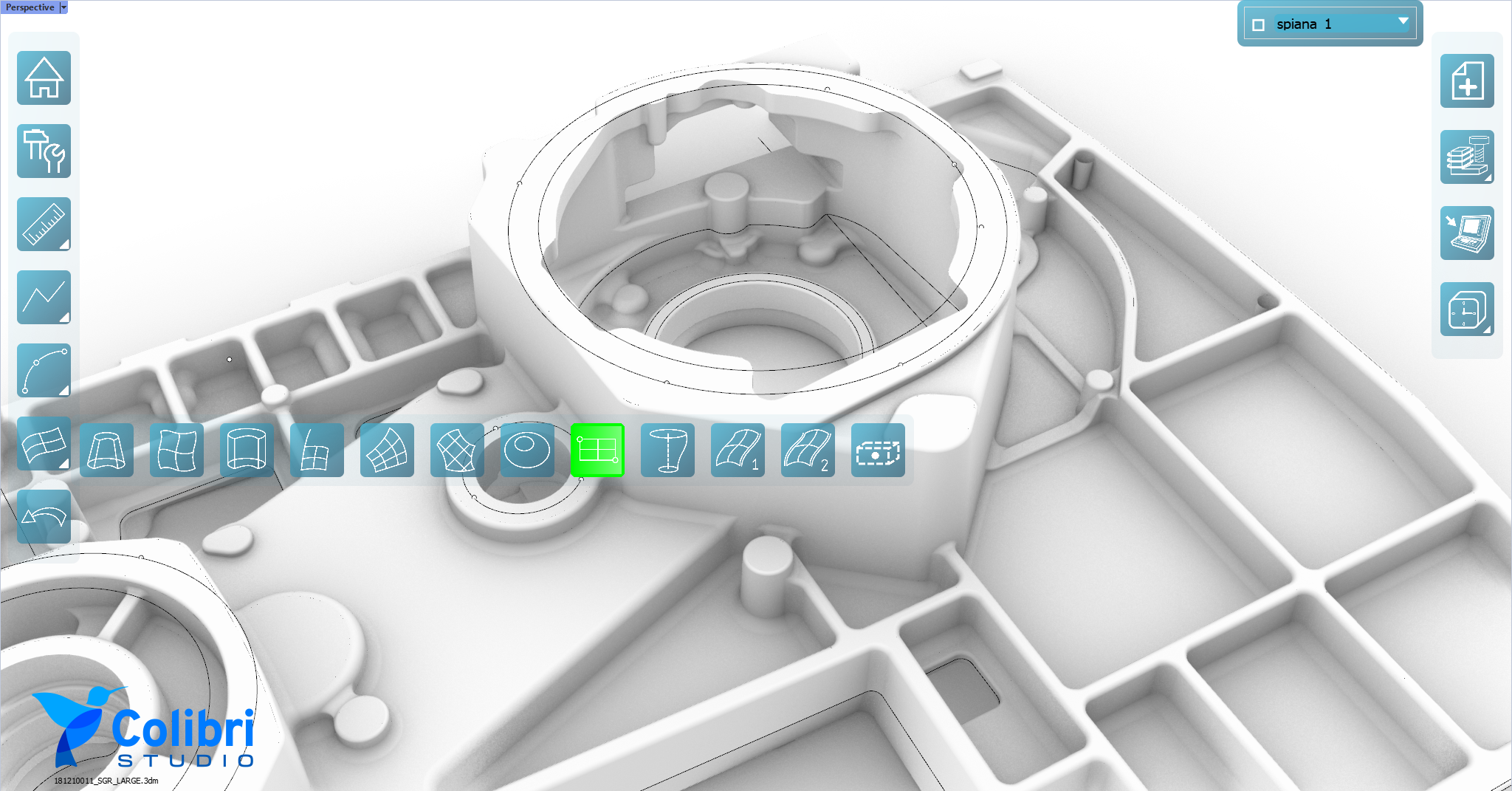
CAD GEOMETRY IMPORT AND HANDLE
ColibriSTUDIO allows importing any kind of 3D model such as STP, IGS, STL and many others. Thru the CAD modeling functions it is possible to select geometrical entities, create surfaces and curves to be used by the CAM functions.
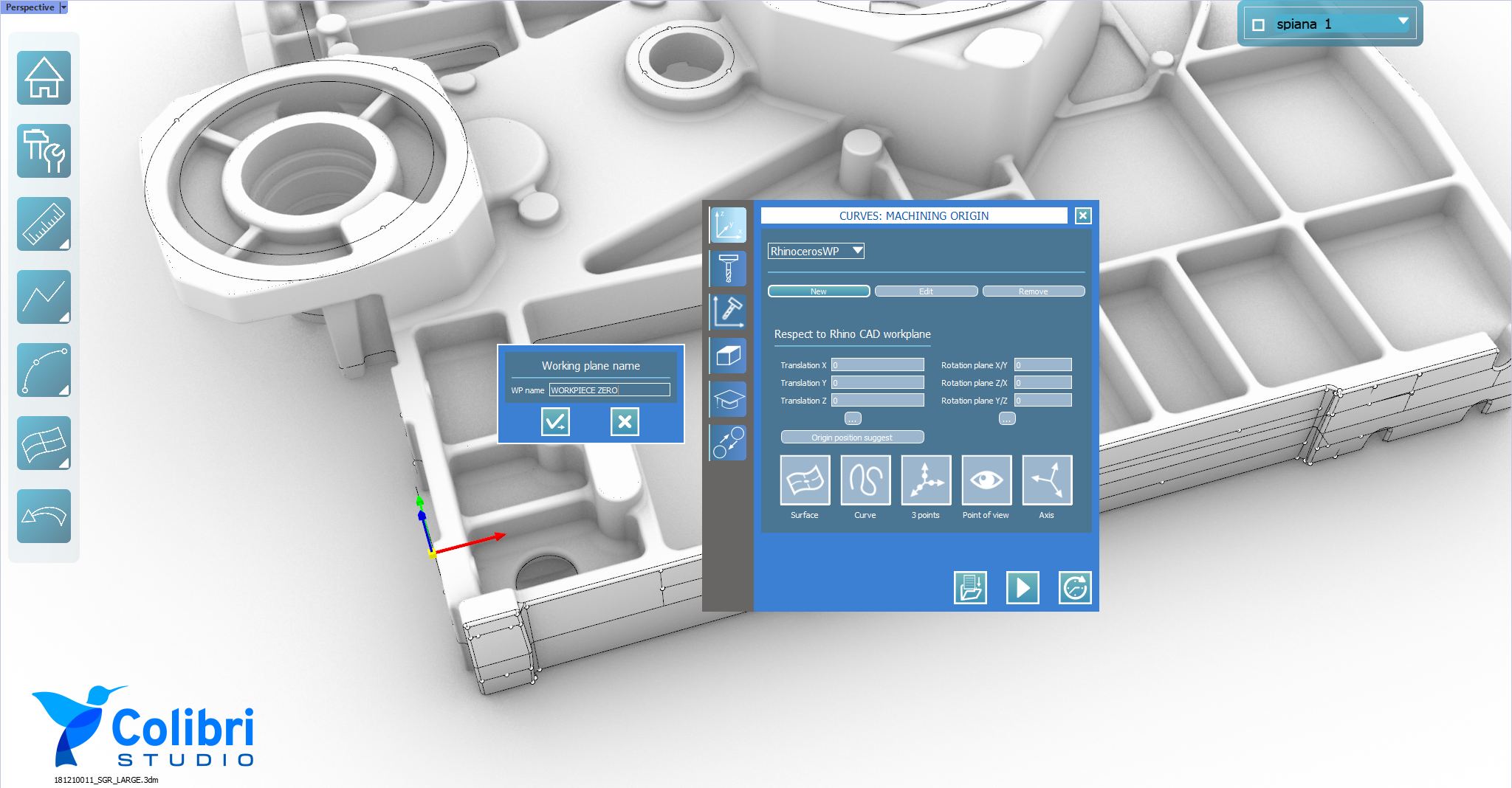

WORKPIECE ZERO CREATION AND MANAGEMENT
A simple and straightforward group of functions can be used to create and edit the position of the WORKPIECE ZERO thus allowing the programmer to have the maximum flexibility.
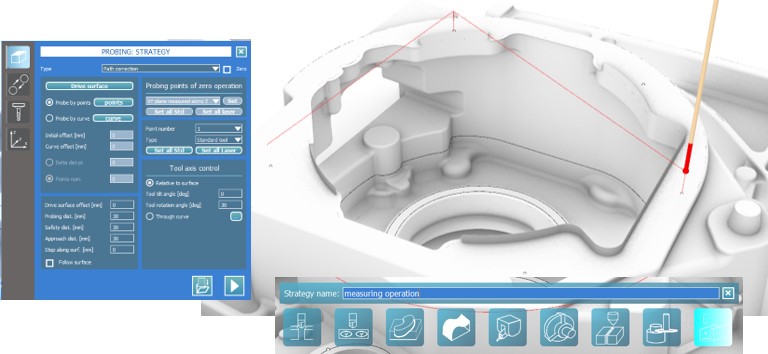
MEASURING PROGRAMS CREATION
It is possible to create measuring programs using a touch probe or a laser by mean of dedicated feature.
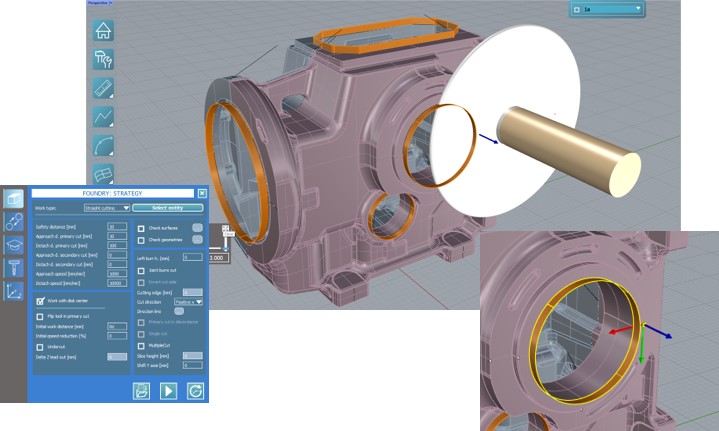
CUTTING PROGRAMS CREATION
Cutting programs can easily be generated by direcly selecting the flash, the riser or the gating.
GRINDING PROGRAMS CREATION
Creating grinding operations using a grinding wheel can be done by simply selecting the curve rapresenting the flash to be removed. The “sticks” method can be used to easly change the inclination of the tool.
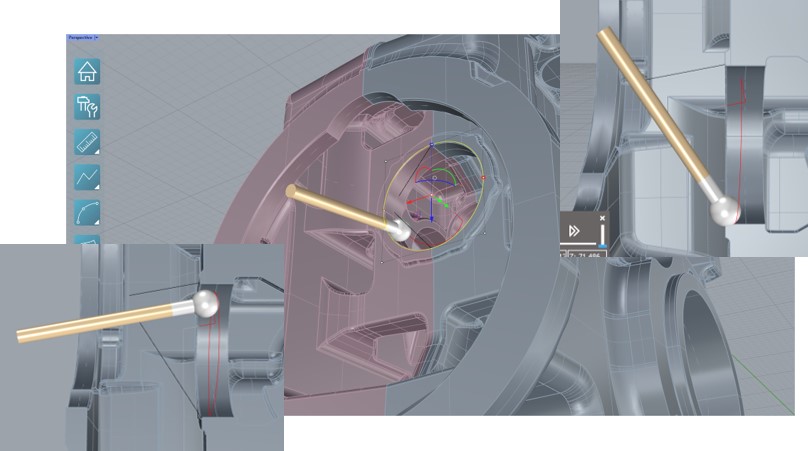
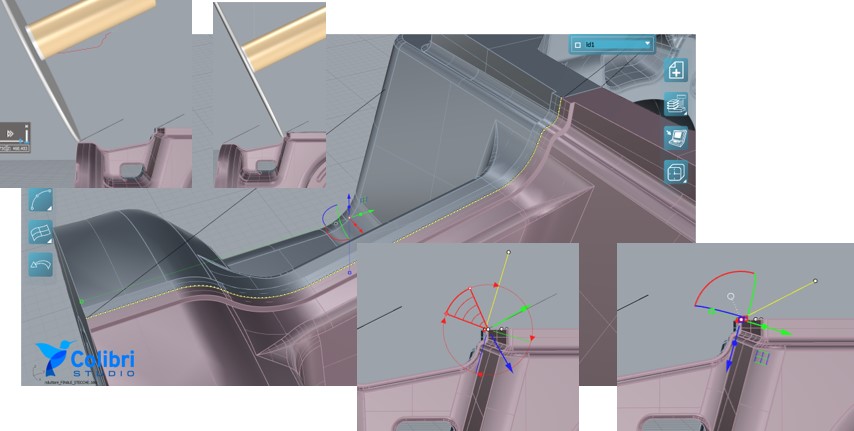
DEBURRING PROGRAMS CREATION
Creating deburring programs using a grinding tool can be done by simply selecting the curve rapresenting the flash to be removed. The “sticks” method can be used to easly change the inclination of the tool.
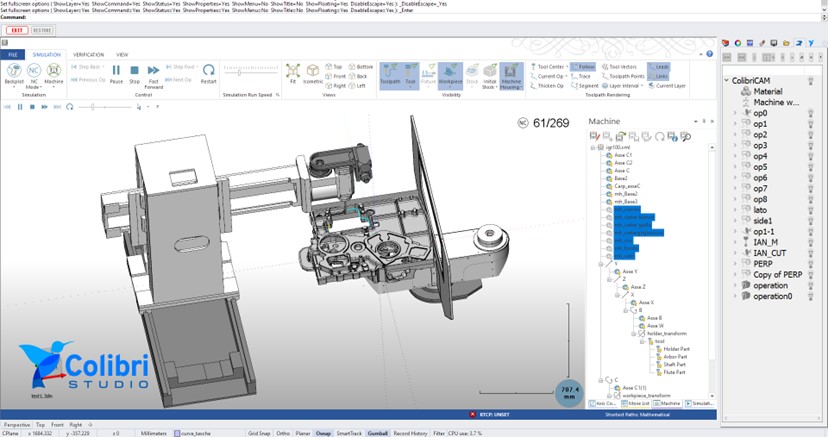
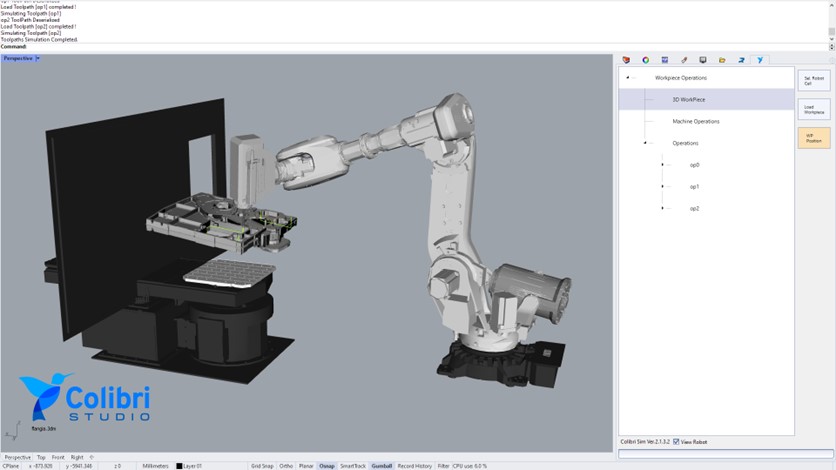
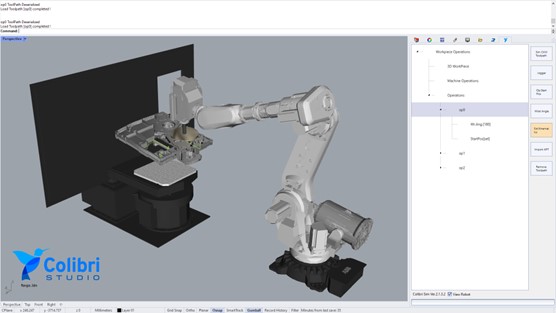
SIMULATION MODULE
Seamless Integrated in the CAM environment, no matter how many axes the machine has, it is possible to virtually simulate its motions while executing the machining program.
The virtual simulation allows to:
- Optimize the workpiece positions
- Optimize robot wrist angle motion strategy
- Optimize rotary tables or linear track motion strategies
- Advanced program editing functions
- Check&solve collisions, singularities and axes limits
- Fix cycles simulation
- Being CAM seamless integrated, all the “robotics” information added to the operation are not lost in case of CAM parameters modification
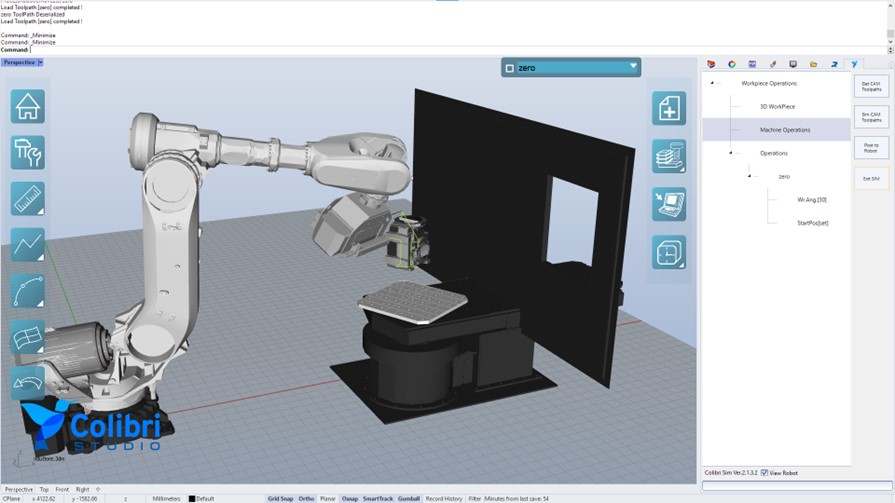
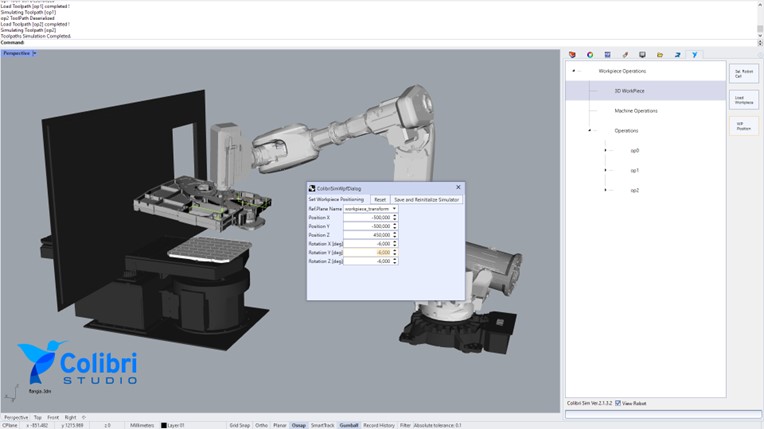
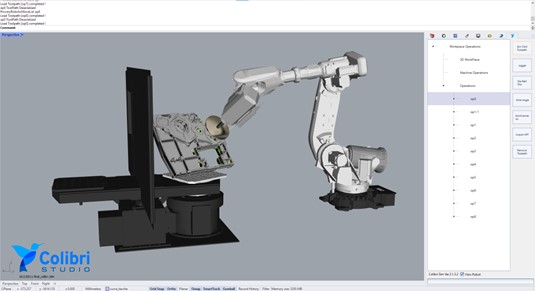
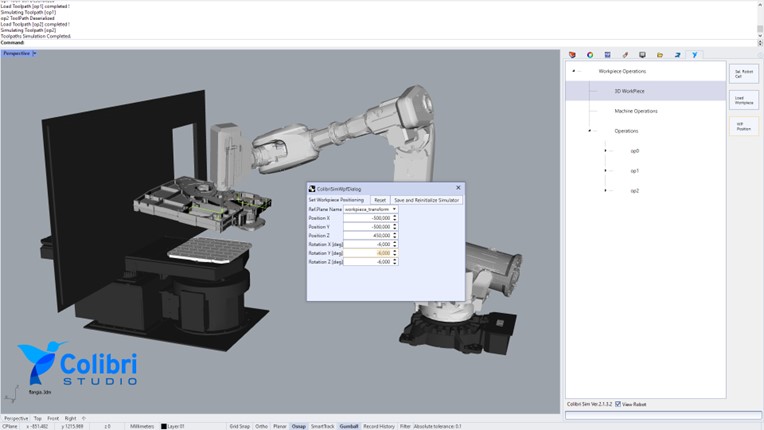
WORKPIECE POSITION OPTIMIZATION
The three machine views along with the robot workspace representation allow the programmer to quickly place the workpiece in a reachable position.
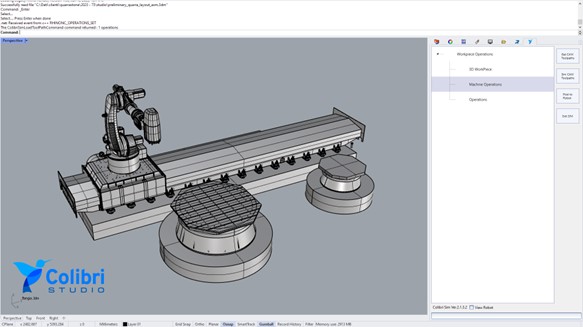
EXTERNAL AXES (ROTARY, LINEAR)
There is no limit on the number of external axes composing the robot cell, in fact it is possible to simulate machine kinematics with 6 DOF (Degree Of Freedom) robot movers. All external axes can be managed in different modes: fix value positioning, robot coordinated fix values positioning, joint motion positioning, robot coordinated continuous positioning. For this last mode, several strategies are available.
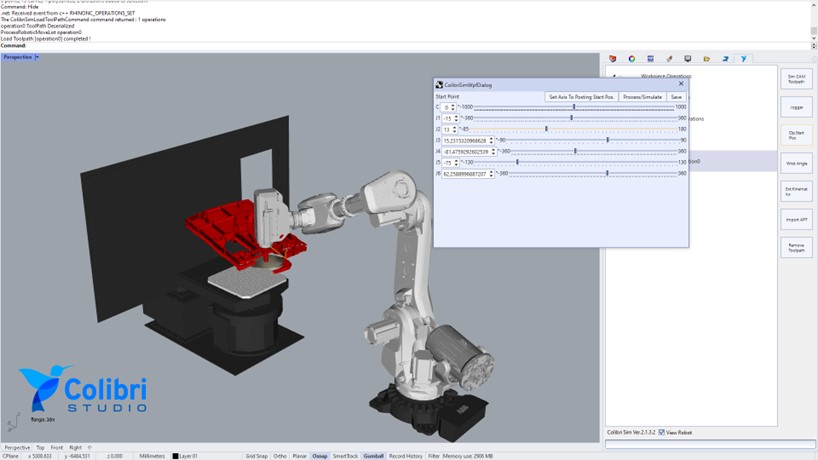
ADVANCED EDITING FUNCTIONS
Apart from the straight forward modifications directly on the CAM module, giving “no limits” flexibility, it is possible to interactively modify or teach a robot target by mean of dragging axes or end effectors, if needed.
CHECK&SOLVE: COLLISIONS
Collisions check can be done in real time during simulation, or during calculation. Through the different functions of wrist angle control, external axes control, tool path editing it is possible to solve collision situations that may happen during simulation. By means of advanced wrist optimization it is possible to automate the collision solving. It is possible to also speed up the collision calculation during calculation by optimizing the selection of the components involved in the calculation.
CHECK&SOLVE: KINEMATIC SINGULARITY AND AXES LIMITS
Singularity check and axes limits check can be done in real time during simulation, or during calculation. Through the different functions of wrist angle control, external axes control, tool path editing it is possible to solve these possible situations. By means of advanced wrist optimization it is possible to automate singularities configuration avoidance and the axes limit configuration avoidance.
TOOL ON ROBOT OR PIECE ON ROBOT CONFIGURATION
ColidriSTUDIO is able to manage robot cell configurations either with tool on robot, piece on robot or the combination of both of them. In regards to the piece on robot configuration it is possible to also manage, not only the wrist angle, which in this case controls the position of the part with respect to the tool, it is also possible to dynamically change the part-to-tool contact point.
CARTESIAN AND SCARA CNC MACHINE SIMULATION
ColibriSTUDIO is also available for a wide range of CNC machine simulation and it is compatible with multi spindle configuration.